Slide 1
|
|
|
- Теодосий Шулев
- преди 4 години
- Прегледи:
Препис
1 ПРОМИШЛЕНИ РОБОТИ-КЛАСИФИКАЦИЯ Признак Видове промишлени роботи 1 Характер на изпълняваната операция 2 Степен на специализация Технологични, спомагателни, универсални Специални, специализирани, многоцелеви 3 Област на приложение Монтаж, леярска промишленост, заваряване, нанасяне на покрития, зачистване и шлифоване на отливки, транспортни операции, автоматичен контрол, обучение, сервизни дейности, обучение и др. 4 Според основната координатна система на движение 5 Според броя степени на подвижност Декартов, Цилиндричен, Сферичен, Антропоморфен, тип СКАРА С 1, 2, 3,...n степени 6 Товароподемност Свръхлеки, леки, средни, тежки, свръхтежки 7 Мобилност Мобилни и стационарни 8 Тип на задвижванията Електромеханично, пневматично, хидравлично, комбинирано 9 Според типа на управлението Твърдо, адаптивно, автономно, комбинирано
2 РОБОТ ЗА ЛЕНТОВО ШЛИФОВАНЕ НА ДЕТАЙЛИ СЪС СЛОЖНИ ПОВЪРХНИНИ Финишните операции (шлифоване, полиране, зачистване на отливки) се характеризират с висока трудопоглъщаемост, непостоянно качество на формата и повърнините (поради силното влияние на субективния фактор) и вредни за здравето на човека производствени условия. Създаването на роботи за извършване на тези операции включва няколко стъпки: Анализ на технологичния процес. Геометричен анализ на повърхнините, които ще бъдат обработвани. Геометричен и кинематичен анализ на взаимодействието между двете контактуващи повърхнини (инструмент-детайл). Структурен синтез и анализ на манипулационни системи на роботи за финишни операции. Разработване на робот за лентово шлифоване на детайли със сложни повърхнини.

3 Геометричен анализ на повърхнините
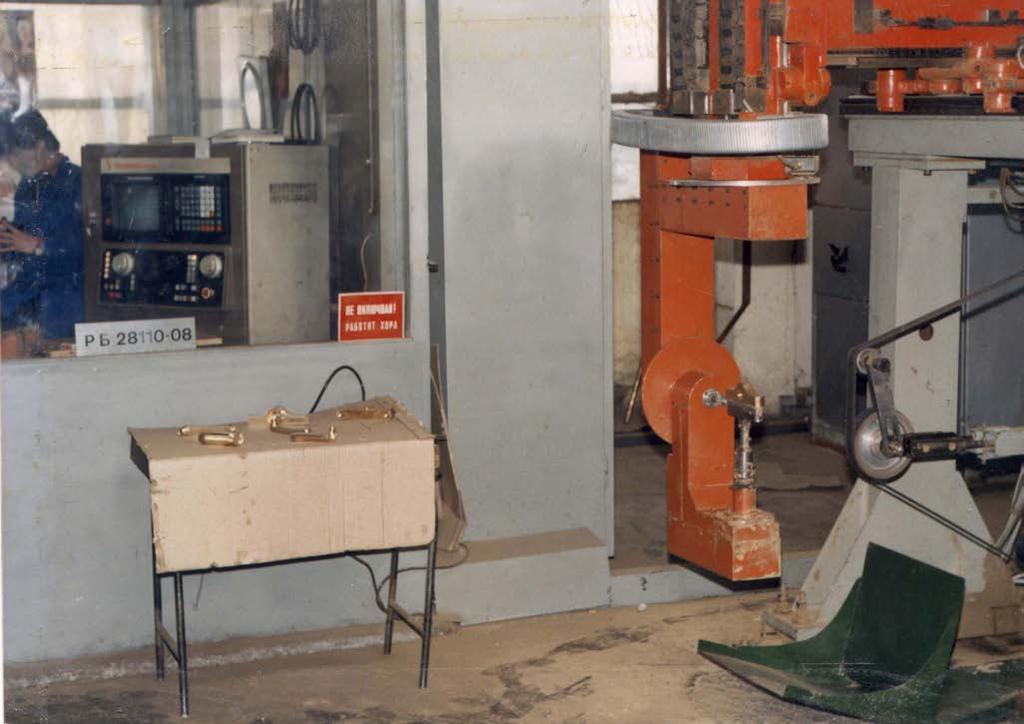
4 РТМ включва робот със шест степени на свобода, изграден на базата на Декартов робот със специална структура на локалната система и CNC управление, двупозиционна лентошлифовъчна станция и аспирационна система. (фиг. 1) Програмите за шлифоване на различни сложни повърхнини са заложени в паметта на управлението. Смяната на хващача е лесна и бърза. Роботизираният модул се използва за шлифоване на детайли за битова арматура, строителни аксесоари, части от велосипеди, мотоциклети, оръжия и др. РТМ беше внедрен в производството в ВИДИМА- ИДЕАЛ ООД, гр. Севлиево.
5 Технически данни: - Степени на свобода Max скорост - 5 m/s. - Работно пространство & мах скорост на всяка ос: X axis mm - 5 m/s.; U axis - ± о /s. Y axis mm - 5 m/s.; V axis - ± о /s. Z axis mm - 5 m/s.; W axis - ± о /s. - Повтаряемост X,Y,Z - ± 0.1 mm. U,V,W - ± 5'. - Мах товароносимост - 5 kg. - Тегло kg. - Управление - FANUC 6M. - Производителност seconds/piece.

6 Фиг. 1а. Кинематична схема на роботизирана клетка за шлифоване Фиг. 1б. Снимка на робота, детайла и инструмента
7 Фиг. 2. Обща структурна схема на контакта инструмент- детайл Фиг. 3. Кинематичнотехнологична схема на манипулационната система на робота
8 фиг. 2 е представена най-общата структурна схема на роботизиран шлифовъчен комплекс. Тя представлява затворена едноконтурна кинематична верига с една технологична двоица. Тази технологична двоица не предава движение чрез силов контакт (както е при реална кинематична двоица), а налага само геометрични ограничения. Всъщност комплексът се състои от два независими отворени едноконтурни механизми инструмент (шлифовъчна станция, която движи На инструмента) и робот, който държи и движи детайла. Тези кинематични вериги се затварят геометрично с двоицата (инструмент - детайл).
9 С корпуса О свързваме неподвижната координатна система. С всяко от звената на веригите свързваме подходящи координатни системи. Тъй като всички реални кинематични двоици са с една степен на свобода, използваме координатните системи и известните хомогенни трансформации на Денавит- Хартенберг. Ако в локалните координатни системи и радиусвекторите на общата контактна точка се запишат като стълбцеви матрици: ( i ) ( i ) ( i ) ( i ) M M M M r = [ x, y, z, 1] T, (i = k, k+1)
10 Преходът от локалните координатни системи към неподвижната координатна система се извършва чрез матрици 4x4 (хомогенни трасформации) като се обхожда от S k към S o за механизъм I, а от S k+1 към S o за механизъм II и тогава: ( k ) ( k + 1) To, k. rm = To, k + 1. rm Това уравнение се нарича матрично уравнение на затвореност на веригата. То е записано за конкретна контактна точка M Σ и дава три независими скаларни уравнения, които решават задачата за положението, скоростта и ускорението за тази точка в неподвижната система. Двете матрици и определят положението (позиция и ориентация) съответно на инструмента и детайла в неподвижната координатна система. Елементите им съдържат метриката и обобщените координати на двата механизма: инструмент и робот. Ако е дадена лявата част на уравнението, т.е. геометрията и положението на инструмента и се търси дясната част, тогава се решава обратната задача на положението, т.е. търсят се ония ставни координати, които осигуряват контакт между (инструмент) and (детайл). Обратно, ако е зададена дясната част и се търси лявата, се решава правата задача на положението.
11 Критерий за оптималност на манипулационната система на робота е цялостното обработване на детайли със сложна пространствена форма. Повърхнините на детайлите, които ще се обработват и преходите между тях се описват чрез аналитични завсимости и се моделират. Детайлите се класифицират по форма и размери. Основните образуващи повърхнини за разглежданата база детайли са равнинни, цилиндрични, конусни, елипсоидни, хиперболоидни, тороидни, сферични. За определяне на необходимия брой степени на свобода на робота трябва да се опишат необходимите траекторни движения за обработване на различните образуващи повърхнини чрез едновременно управлявани оси: за цилиндрични и конусни повърхнини са необходими едновременни движения по две оси; за елипсоидни повърхнини по три оси; за хиперболоидни, тороидни и сферични повърхнини по пет и повече едновременно управляеми оси. За избраната в тази последователност структура на робота се извършва оптимизация на формата на детайла. За оптимална се счита онази форма на детайла, която покрива следните показатели: не изисква повече от четири едновременно управляеми оси; осигурява плавно преминаване от една съставляваща повърхнина към друга; изисква минимално време за обработване. При оптимизацията за непроменливи се приемат тези параметри на детайла, които характеризират неговите експлоатационни характеристики. Променливи параметри са размерите, определящи прехода между отделните съставляващи повърхнини и напречни сечения, в частност радиуса на обвиващата повърхнина на детайла.
12

13
Slide 1
 Проектът се осъществява с финансовата подкрепа на Оперативна Програма Развитие на Човешките Ресурси 7 3, Съфинансиран от Европейския Социален Фонд на Европейския Съюз Инвестира във вашето бъдеще! ПОВИШАВАНЕ
Проектът се осъществява с финансовата подкрепа на Оперативна Програма Развитие на Човешките Ресурси 7 3, Съфинансиран от Европейския Социален Фонд на Европейския Съюз Инвестира във вашето бъдеще! ПОВИШАВАНЕ
Microsoft Word - VypBIOL-01-kinematika.doc
 ВЪПРОС 1 КИНЕМАТИКА НА МАТЕРИАЛНА ТОЧКА ОСНОВНИ ПОНЯТИЯ И ВЕЛИЧИНИ Във въпроса Кинематика на материална точка основни понятия и величини вие ще се запознаете със следните величини, понятия и закони, както
ВЪПРОС 1 КИНЕМАТИКА НА МАТЕРИАЛНА ТОЧКА ОСНОВНИ ПОНЯТИЯ И ВЕЛИЧИНИ Във въпроса Кинематика на материална точка основни понятия и величини вие ще се запознаете със следните величини, понятия и закони, както
АВТОМАТИЗИРАН КОМПЛЕКС ЗА СИТОПЕЧАТ ВЪРХУ ЦИЛИНДРИЧНИ ПОВЪРХНИНИ
 ОТНОСНО ИЗБОРА НА ПРОМИШЛЕНИ РОБОТИ ЗА ОБСЛУЖВАНЕ НА ТЕХНОЛОГИЧНИ ЕДИНИЦИ ПРИ АВТОМАТИЗАЦИЯ НА ДИСКРЕТНИ ПРОИЗВОДСТВЕНИ ПРОЦЕСИ Татяна Андонова-Вакарелска, Пламен Угринов Резюме: Промишлените роботи са
ОТНОСНО ИЗБОРА НА ПРОМИШЛЕНИ РОБОТИ ЗА ОБСЛУЖВАНЕ НА ТЕХНОЛОГИЧНИ ЕДИНИЦИ ПРИ АВТОМАТИЗАЦИЯ НА ДИСКРЕТНИ ПРОИЗВОДСТВЕНИ ПРОЦЕСИ Татяна Андонова-Вакарелска, Пламен Угринов Резюме: Промишлените роботи са
Slide 1
 Проектът се осъществява с финансовата подкрепа на Оперативна Програма Развитие на Човешките Ресурси 2007 2013, Съфинансиран от Европейския Социален Фонд на Европейския Съюз Инвестира във вашето бъдеще!
Проектът се осъществява с финансовата подкрепа на Оперативна Програма Развитие на Човешките Ресурси 2007 2013, Съфинансиран от Европейския Социален Фонд на Европейския Съюз Инвестира във вашето бъдеще!
Проектът се осъществява с финансовата подкрепа на Оперативна Програма Развитие на Човешките Ресурси , Съфинансиран от Европейския Социален Фо
 ЛЯТНА ШКОЛА 2013 ПОВИШАВАНЕ ТОЧНОСТТА НА РОБОТ ЧРЕЗ ИДЕНТИФИКАЦИЯ И РАЗПОЗНАВАНЕ Доц. д-р инж. Роман Захариев ПОВИШАВАНЕ НА ЕФЕКТИВНОСТТА И КАЧЕСТВОТО НА ОБУЧЕНИЕ И НА НАУЧНИЯ ПОТЕНЦИАЛ В ОБЛАСТТА НА СИСТЕМНОТО
ЛЯТНА ШКОЛА 2013 ПОВИШАВАНЕ ТОЧНОСТТА НА РОБОТ ЧРЕЗ ИДЕНТИФИКАЦИЯ И РАЗПОЗНАВАНЕ Доц. д-р инж. Роман Захариев ПОВИШАВАНЕ НА ЕФЕКТИВНОСТТА И КАЧЕСТВОТО НА ОБУЧЕНИЕ И НА НАУЧНИЯ ПОТЕНЦИАЛ В ОБЛАСТТА НА СИСТЕМНОТО
Microsoft Word - ch2.4.doc
 9 Кинематика на сложни движения на твърдо тяло 9 Сферично движение на твърдо тяло Определение Сферично движение на твърдо тяло или движение на тяло около неподвижна точка наричаме такова движение при което
9 Кинематика на сложни движения на твърдо тяло 9 Сферично движение на твърдо тяло Определение Сферично движение на твърдо тяло или движение на тяло около неподвижна точка наричаме такова движение при което
РЕЗЮМЕТА на трудовете на доц. д-р Галина Николчева Резюмета на трудовете от хабилитационния труд I I.1 В работата се представя аналитичен метод за про
 РЕЗЮМЕТА на трудовете на доц. д-р Галина Николчева Резюмета на трудовете от хабилитационния труд I I.1 В работата се представя аналитичен метод за профилиране на палцови фрези за обработване на винтови
РЕЗЮМЕТА на трудовете на доц. д-р Галина Николчева Резюмета на трудовете от хабилитационния труд I I.1 В работата се представя аналитичен метод за профилиране на палцови фрези за обработване на винтови
Microsoft Word - stokdovo saprotivlenie.doc
 Движения при наличие на Стоксово съпротивление При един често срещан вид движения неподвижно тяло започва да се движи под действие на сила с постоянна посока Ако върху тялото действа и Стоксова съпротивителна
Движения при наличие на Стоксово съпротивление При един често срещан вид движения неподвижно тяло започва да се движи под действие на сила с постоянна посока Ако върху тялото действа и Стоксова съпротивителна
АВТОМАТИЗИРАН КОМПЛЕКС ЗА СИТОПЕЧАТ ВЪРХУ ЦИЛИНДРИЧНИ ПОВЪРХНИНИ
 508 ОПТИМИЗИРАНЕ НА 4 И 5 ОСНИ ФРЕЗОВИ ОПЕРАЦИИ ПРИ ОБРАБОТВАНЕ НА ДЕТАЙЛ КОЛЕЛО ТУРБИННО С ПОМОЩТА НА CAD/CAM СИСТЕМИ Михаела Топалова, Михаил Милев, Димитър Панайотов Резюме: В статията са разгледани
508 ОПТИМИЗИРАНЕ НА 4 И 5 ОСНИ ФРЕЗОВИ ОПЕРАЦИИ ПРИ ОБРАБОТВАНЕ НА ДЕТАЙЛ КОЛЕЛО ТУРБИННО С ПОМОЩТА НА CAD/CAM СИСТЕМИ Михаела Топалова, Михаил Милев, Димитър Панайотов Резюме: В статията са разгледани
Microsoft Word - GDM-kamioni 2008.doc
 Гумодемонтажни машини за тежкотоварни, селскостопански и земекопни МПС 1 GG 560 Електрохидравлична гумодемонтажна машина за камиони, селскостопански и земекопни МПС. Размерите и работните характеристики
Гумодемонтажни машини за тежкотоварни, селскостопански и земекопни МПС 1 GG 560 Електрохидравлична гумодемонтажна машина за камиони, селскостопански и земекопни МПС. Размерите и работните характеристики
Microsoft Word - KZ_TSG.doc
 ПРИЛОЖЕНИЕ НА ТЕОРИЯТА НА СИГНАЛНИТЕ ГРАФИ ЗА АНАЛИЗ НА ЕЛЕКТРОННИ СХЕМИ С ОПЕРАЦИОННИ УСИЛВАТЕЛИ В теорията на електронните схеми се решават три основни задачи: ) анализ; ) синтез; ) оптимизация. Обект
ПРИЛОЖЕНИЕ НА ТЕОРИЯТА НА СИГНАЛНИТЕ ГРАФИ ЗА АНАЛИЗ НА ЕЛЕКТРОННИ СХЕМИ С ОПЕРАЦИОННИ УСИЛВАТЕЛИ В теорията на електронните схеми се решават три основни задачи: ) анализ; ) синтез; ) оптимизация. Обект
ИКОНОМИЧЕСКИ УНИВЕРСИТЕТ - В А Р Н А Ф А К У Л Т Е Т И Н Ф О Р М А Т И К А КАТЕДРА СТАТИСТИКА И ПРИЛОЖНА МАТЕМАТИКА УТВЪРЖДАВАМ: Ректор: (Проф. д-р Пл
 ИКОНОМИЧЕСКИ УНИВЕРСИТЕТ - В А Р Н А Ф А К У Л Т Е Т И Н Ф О Р М А Т И К А КАТЕДРА СТАТИСТИКА И ПРИЛОЖНА МАТЕМАТИКА УТВЪРЖДАВАМ: Ректор: (Проф. д-р Пл. Илиев) У Ч Е Б Н А П Р О Г Р А М А ПО ДИСЦИПЛИНАТА:
ИКОНОМИЧЕСКИ УНИВЕРСИТЕТ - В А Р Н А Ф А К У Л Т Е Т И Н Ф О Р М А Т И К А КАТЕДРА СТАТИСТИКА И ПРИЛОЖНА МАТЕМАТИКА УТВЪРЖДАВАМ: Ректор: (Проф. д-р Пл. Илиев) У Ч Е Б Н А П Р О Г Р А М А ПО ДИСЦИПЛИНАТА:
PowerPoint Presentation
 Утвърдена специализация в производство на метални изделия от листов материал, както и в дейността по проектиране и производството на инструментална екипировка за пресова обработка на мeталите. За нас СП
Утвърдена специализация в производство на метални изделия от листов материал, както и в дейността по проектиране и производството на инструментална екипировка за пресова обработка на мeталите. За нас СП
Изследване на устойчивостта на равновесното състояние на системи с краен брой степени на свобода Следващият пример илюстрира основните разсъждения при
 Изследване на устойчивостта на равновесното състояние на системи с краен брой степени на свобода Следващият пример илюстрира основните разсъждения при изследване на устойчивостта на равновесната форма
Изследване на устойчивостта на равновесното състояние на системи с краен брой степени на свобода Следващият пример илюстрира основните разсъждения при изследване на устойчивостта на равновесната форма
Microsoft Word - Lecture 9-Krivolineyni-Koordinati.doc
 6 Лекция 9: Криволинейни координатни системи 9.. Локален базиз и метричен тензор. В много случаи е удобно точките в пространството да се параметризират с криволинейни координати и и и вместо с декартовите
6 Лекция 9: Криволинейни координатни системи 9.. Локален базиз и метричен тензор. В много случаи е удобно точките в пространството да се параметризират с криволинейни координати и и и вместо с декартовите
Microsoft Word TM.doc
 1 МИНИСТЕРСТВО НА ОБРАЗОВАНИЕТО И НАУКАТА УТВЪРЖДАВАМ: ДОЦ. Д-Р ВЛАДИМИР АТАНАСОВ МИНИСТЪР ИЗПИТНА ПРОГРАМА за провеждане на държавни изпити за придобиване втора степен на професионална квалификация ПРОФЕСИЯ:
1 МИНИСТЕРСТВО НА ОБРАЗОВАНИЕТО И НАУКАТА УТВЪРЖДАВАМ: ДОЦ. Д-Р ВЛАДИМИР АТАНАСОВ МИНИСТЪР ИЗПИТНА ПРОГРАМА за провеждане на държавни изпити за придобиване втора степен на професионална квалификация ПРОФЕСИЯ:
АВТОМАТИЗИРАН КОМПЛЕКС ЗА СИТОПЕЧАТ ВЪРХУ ЦИЛИНДРИЧНИ ПОВЪРХНИНИ
 ИЗСЛЕДВАНЕ НА ЗЪБНА ПРЕДАВКА ОТ ВОДНИ СЪОРЪЖЕНИЯ В СРЕДА НА САЕ СИСТЕМА Милчо Ташев Резюме: В настоящата статия са представени получените резултати от изследване в среда на САЕ система една конкретна зъбна
ИЗСЛЕДВАНЕ НА ЗЪБНА ПРЕДАВКА ОТ ВОДНИ СЪОРЪЖЕНИЯ В СРЕДА НА САЕ СИСТЕМА Милчо Ташев Резюме: В настоящата статия са представени получените резултати от изследване в среда на САЕ система една конкретна зъбна
Microsoft Word Ist.doc
 М И Н И С Т Е Р С Т В О Н А О Б Р А З О В А Н И Е Т О И Н А У К А Т А З А П О В Е Д РД 09 1458 / 18.09.2006 г. На основание чл. 36, ал. 2, във връзка с чл. 36, ал.1 от Закона за професионалното образование
М И Н И С Т Е Р С Т В О Н А О Б Р А З О В А Н И Е Т О И Н А У К А Т А З А П О В Е Д РД 09 1458 / 18.09.2006 г. На основание чл. 36, ал. 2, във връзка с чл. 36, ал.1 от Закона за професионалното образование
Microsoft Word - VypBIOL-10-Tvyrdo-Tialo.doc
 Въпрос 10 МЕХАНИКА НА ИДЕАЛНО ТВЪРДО ТЯЛО Във въпроса Механика на идеално твърдо тяло вие ще се запознаете със следните величини, понятия и закони, както и с основните единици за измерване: Идеално твърдо
Въпрос 10 МЕХАНИКА НА ИДЕАЛНО ТВЪРДО ТЯЛО Във въпроса Механика на идеално твърдо тяло вие ще се запознаете със следните величини, понятия и закони, както и с основните единици за измерване: Идеално твърдо
ПРОФЕСИОНАЛНА ГИМНАЗИЯ ПО ЯДРЕНА ЕНЕРГЕТИКА ИГОР КУРЧАТОВ ГР. КОЗЛОДУЙ ДОКЛАД СЪХРАНЕНИЕ НА РАДИОАКТИВНИ ОТПАДЪЦИ С МНОГО НИСКА АКТИВНОСТ Въведение Съ
 ПРОФЕСИОНАЛНА ГИМНАЗИЯ ПО ЯДРЕНА ЕНЕРГЕТИКА ИГОР КУРЧАТОВ ГР. КОЗЛОДУЙ ДОКЛАД СЪХРАНЕНИЕ НА РАДИОАКТИВНИ ОТПАДЪЦИ С МНОГО НИСКА АКТИВНОСТ Въведение Съгласно стратегията за управление на РАО, изграждането
ПРОФЕСИОНАЛНА ГИМНАЗИЯ ПО ЯДРЕНА ЕНЕРГЕТИКА ИГОР КУРЧАТОВ ГР. КОЗЛОДУЙ ДОКЛАД СЪХРАНЕНИЕ НА РАДИОАКТИВНИ ОТПАДЪЦИ С МНОГО НИСКА АКТИВНОСТ Въведение Съгласно стратегията за управление на РАО, изграждането
ЦЕНТЪР ПО ИНФОРМАТИКА И ТЕХНИЧЕСКИ НАУКИ УЧЕБНА ПРОГРАМА EN306 ЕЛЕМЕНТИ И МЕХАНИЗМИ В РОБОТИКАТА Актуализирана: прот. 16 от г. Лектор: проф
 ЦЕНТЪР ПО ИНФОРМАТИКА И ТЕХНИЧЕСКИ НАУКИ УЧЕБНА ПРОГРАМА EN306 ЕЛЕМЕНТИ И МЕХАНИЗМИ В РОБОТИКАТА Актуализирана: прот. 16 от 17.06.2016 г. Лектор: проф. д-р Радостин Долчинков Утвърждавам: Декан: АНОТАЦИЯ
ЦЕНТЪР ПО ИНФОРМАТИКА И ТЕХНИЧЕСКИ НАУКИ УЧЕБНА ПРОГРАМА EN306 ЕЛЕМЕНТИ И МЕХАНИЗМИ В РОБОТИКАТА Актуализирана: прот. 16 от 17.06.2016 г. Лектор: проф. д-р Радостин Долчинков Утвърждавам: Декан: АНОТАЦИЯ
XХIV MНТК АДП-2015 ПРОЕКТИРАНЕ НА ЗАХРАНВАЩИ ПОЗИЦИИ В АВТОМАТИЗИРАН КОМПЛЕКС ЗА МОНТАЖ НА ДЕТАЙЛ ТИП ПЛАСТИНА Любомир Личев, Ренета Димитрова Резюме:
 ПРОЕКТИРАНЕ НА ЗАХРАНВАЩИ ПОЗИЦИИ В АВТОМАТИЗИРАН КОМПЛЕКС ЗА МОНТАЖ НА ДЕТАЙЛ ТИП ПЛАСТИНА Любомир Личев, Ренета Димитрова Резюме: Целта на настоящата статия е проектиране на захранващи позиции на детайли
ПРОЕКТИРАНЕ НА ЗАХРАНВАЩИ ПОЗИЦИИ В АВТОМАТИЗИРАН КОМПЛЕКС ЗА МОНТАЖ НА ДЕТАЙЛ ТИП ПЛАСТИНА Любомир Личев, Ренета Димитрова Резюме: Целта на настоящата статия е проектиране на захранващи позиции на детайли
Microsoft Word - UIP_mat_7klas_
 Приложение 2 УЧЕБНО-ИЗПИТНА ПРОГРАМА ПО МАТЕМАТИКА ЗА НАЦИОНАЛНОТО ВЪНШНО ОЦЕНЯВАНЕ В КРАЯ НА VII КЛАС І. Вид и времетраене Изпитът от националното външно оценяване е писмен. Равнището на компетентностите
Приложение 2 УЧЕБНО-ИЗПИТНА ПРОГРАМА ПО МАТЕМАТИКА ЗА НАЦИОНАЛНОТО ВЪНШНО ОЦЕНЯВАНЕ В КРАЯ НА VII КЛАС І. Вид и времетраене Изпитът от националното външно оценяване е писмен. Равнището на компетентностите
Техническа спецификация на предвиденoтo за закупуване оборудване по процедурата Доставка, монтаж и въвеждане в експлоатация на 9 броя ДМА: 1. Линия за
 Техническа спецификация на предвиденoтo за закупуване оборудване по процедурата Доставка, монтаж и въвеждане в експлоатация на 9 броя ДМА: 1. Линия за производство на летви. 2. Линия за разкрояване,огъване,
Техническа спецификация на предвиденoтo за закупуване оборудване по процедурата Доставка, монтаж и въвеждане в експлоатация на 9 броя ДМА: 1. Линия за производство на летви. 2. Линия за разкрояване,огъване,
ЦЕНТЪР ПО ИНФОРМАТИКА И ТЕХНИЧЕСКИ НАУКИ УЧЕБНА ПРОГРАМА Утвърждавам: Декан: EN 274 ПРИЛОЖНА МЕХАНИКА И РОБОТИКА Актуализирана: прот. 16 от
 ЦЕНТЪР ПО ИНФОРМАТИКА И ТЕХНИЧЕСКИ НАУКИ УЧЕБНА ПРОГРАМА Утвърждавам: Декан: EN 274 ПРИЛОЖНА МЕХАНИКА И РОБОТИКА Актуализирана: прот. 16 от 17.06.2016 г. Лектор: проф. д-р Радостин Долчинков АНОТАЦИЯ Учебната
ЦЕНТЪР ПО ИНФОРМАТИКА И ТЕХНИЧЕСКИ НАУКИ УЧЕБНА ПРОГРАМА Утвърждавам: Декан: EN 274 ПРИЛОЖНА МЕХАНИКА И РОБОТИКА Актуализирана: прот. 16 от 17.06.2016 г. Лектор: проф. д-р Радостин Долчинков АНОТАЦИЯ Учебната
110 (Глава 2. Тензорен анализ 12. Диференциални операции в криволинейни координати Градиент на скаларно поле. Дефиницията (11.5) на градиента чр
 на градиента чр") 0 (Глава 2. Тензорен анализ 2. Диференциални операции в криволинейни координати 2.. Градиент на скаларно поле. Дефиницията (.5) на градиента чрез производната по направление позволява лесно да намерим
0 (Глава 2. Тензорен анализ 2. Диференциални операции в криволинейни координати 2.. Градиент на скаларно поле. Дефиницията (.5) на градиента чрез производната по направление позволява лесно да намерим
4
 Метод и машина за многооперационно обработване на стъпални ротационни детайли Част Технология за синхронизирано обработване на два патронникови детайла доц. д-р Л. Ж. Стоев, ТУ-София, lstoev@tu-sofia.bg,
Метод и машина за многооперационно обработване на стъпални ротационни детайли Част Технология за синхронизирано обработване на два патронникови детайла доц. д-р Л. Ж. Стоев, ТУ-София, lstoev@tu-sofia.bg,
ACO Muli-Max-F mono/duo - A15 Полиетиленови помпени станции Ø816 Ø785 Капак клас А15 БДС EN 124 Удължител за сферичен кран Нагнетателна тръба DN 40 с
 ACO Muli-Max-F mono/duo - A15 Ø Ø75 Капак клас А15 БДС EN Удължител за сферичен кран Нагнетателна тръба DN с накрайник Storz C 5 (опция) * Еластичен ремък (опция) * Показано: помпена станция - duo * не
ACO Muli-Max-F mono/duo - A15 Ø Ø75 Капак клас А15 БДС EN Удължител за сферичен кран Нагнетателна тръба DN с накрайник Storz C 5 (опция) * Еластичен ремък (опция) * Показано: помпена станция - duo * не
Microsoft Word - VypBIOL-02-Kin-Okryznost.doc
 ВЪПРОС КИНЕМАТИКА НА ДВИЖЕНИЕТО НА МАТЕРИАЛНА ТОЧКА ПО ОКРЪЖНОСТ Във въпроса Кинематика на движението на материална точка по окръжност вие ще се запознаете със следните величини, понятия и закони, както
ВЪПРОС КИНЕМАТИКА НА ДВИЖЕНИЕТО НА МАТЕРИАЛНА ТОЧКА ПО ОКРЪЖНОСТ Във въпроса Кинематика на движението на материална точка по окръжност вие ще се запознаете със следните величини, понятия и закони, както
Slide 1
 Въпрос 18 Пропелерни помпи Лекции по Помпи и помпени станции 1 1) Устройство Работно колело 1, на което са закрепени неподвижно или подвижно от три до шест лопатки 2 с аеродинамична форма и извит нагоре
Въпрос 18 Пропелерни помпи Лекции по Помпи и помпени станции 1 1) Устройство Работно колело 1, на което са закрепени неподвижно или подвижно от три до шест лопатки 2 с аеродинамична форма и извит нагоре
Microsoft PowerPoint - Model_Dec_2008_17_21
 Структура. Теория на графите общи понятия. Същност на мрежовите модели. Приложение на мрежови модели при управление на проекти и програми Общи понятия от Теорията на графите, използвани при мрежовите модели
Структура. Теория на графите общи понятия. Същност на мрежовите модели. Приложение на мрежови модели при управление на проекти и програми Общи понятия от Теорията на графите, използвани при мрежовите модели
Таблица с параметри: Economy MHI 403 (3~400 V, EPDM) Характеристики Хидравлична мощност Температура на флуида T C Температура на околната с
 Характеристики Хидравлична мощност Температура на флуида T C Температура на околната с") Таблица с параметри: Economy MHI 403 (3~400 V, EPDM) Характеристики Хидравлична мощност Температура на флуида T -15...+110 C Температура на околната среда макс. T 40 C Номинално налягане Входно налягане
Таблица с параметри: Economy MHI 403 (3~400 V, EPDM) Характеристики Хидравлична мощност Температура на флуида T -15...+110 C Температура на околната среда макс. T 40 C Номинално налягане Входно налягане
Slide 1
 Проектът се осъществява с финансовата подкрепа на Оперативна Програма Развитие на Човешките Ресурси 2007 2013, Съфинансиран от Европейския Социален Фонд на Европейския Съюз Инвестира във вашето бъдеще!
Проектът се осъществява с финансовата подкрепа на Оперативна Програма Развитие на Човешките Ресурси 2007 2013, Съфинансиран от Европейския Социален Фонд на Европейския Съюз Инвестира във вашето бъдеще!
April 23, 2013
 April 23, 2013 Работа на парогенераторите при неблагоприятен водо-химичен режим Наличие на хлориди по втори контур Намаляване на проектния вакуум Наличие на множество запушени тръбички от сноповете, водещи
April 23, 2013 Работа на парогенераторите при неблагоприятен водо-химичен режим Наличие на хлориди по втори контур Намаляване на проектния вакуум Наличие на множество запушени тръбички от сноповете, водещи
PowerPoint Presentation
 Въведение в ускорителите на заредени частици Ангел Х. Ангелов Институт за ядрени изследвания и ядрена енергетика БАН СЪДЪРЖАНИЕ 1. Дефиниция за ускорител на заредени частици. 2. Източници на заредени частици.
Въведение в ускорителите на заредени частици Ангел Х. Ангелов Институт за ядрени изследвания и ядрена енергетика БАН СЪДЪРЖАНИЕ 1. Дефиниция за ускорител на заредени частици. 2. Източници на заредени частици.
Проектиране на непрекъснат ПИД - регулатор. Динамичните свойства на системите за автоматично регулиране, при реализация на първия етап от проектиранет
 Проектиране на непрекъснат П - регулатор инамичните свойства на системите за автоматично регулиране, при реализация на първия етап от проектирането им, могат да се окажат незадоволителни по отношение на
Проектиране на непрекъснат П - регулатор инамичните свойства на системите за автоматично регулиране, при реализация на първия етап от проектирането им, могат да се окажат незадоволителни по отношение на
Acti 9_Catalogue.pdf
 ic60l крива B, C, K, Z IEC/EN 60947-2 IEC/EN 60898-1 до 40 A PB104442-40 Каталожни номера PB104452-40 Автоматичен прекъсвач ic60l Тип 1P 2P b Автоматичните прекъсвачи ic60l отговарят на два стандарта и
ic60l крива B, C, K, Z IEC/EN 60947-2 IEC/EN 60898-1 до 40 A PB104442-40 Каталожни номера PB104452-40 Автоматичен прекъсвач ic60l Тип 1P 2P b Автоматичните прекъсвачи ic60l отговарят на два стандарта и